Como Controlar a Velocidade de um Motor DC Simples com Arduino: Guia Completo e Detalhado
Os motores de corrente contínua (DC) são omnipresentes no mundo da eletrónica e da robótica. Desde pequenos robôs a ventoinhas, passando por sistemas de automação e projetos DIY (Faça Você Mesmo), a capacidade de controlar a velocidade de um motor DC é uma habilidade fundamental. Felizmente, a plataforma Arduino oferece uma maneira acessível e relativamente simples de alcançar este controlo preciso.
Neste guia completo, exploraremos passo a passo como pode controlar a velocidade de um motor DC simples utilizando um Arduino. Abordaremos os conceitos essenciais, os componentes necessários, diferentes métodos de controlo, a montagem dos circuitos, a programação e dicas de otimização. Quer seja um iniciante em eletrónica ou um entusiasta experiente à procura de aprofundar conhecimentos, este artigo fornecerá as informações necessárias para dominar o controlo de velocidade de motores DC com Arduino.
1. Introdução aos Motores DC Simples
Antes de mergulharmos no controlo, é fundamental compreender o componente principal: o motor DC.
O que é um Motor DC?
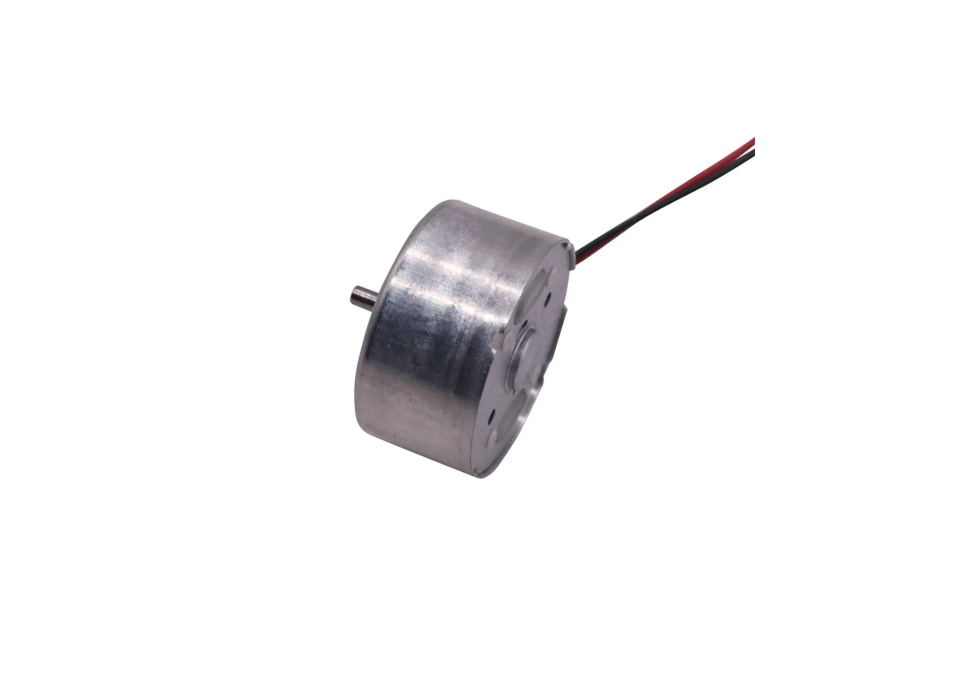
Um motor de corrente contínua (DC - Direct Current) é um dispositivo eletromecânico que converte energia elétrica (corrente contínua) em energia mecânica (rotação). São talvez o tipo mais comum de motor encontrado em pequenos projetos, brinquedos e inúmeros aparelhos eletrónicos. Os motores DC "simples" a que nos referimos aqui são tipicamente motores DC escovados (brushed), que são mais fáceis de controlar em termos de velocidade, embora menos eficientes e com menor vida útil que os motores sem escovas (brushless).
Princípio Básico de Funcionamento
O funcionamento de um motor DC escovado baseia-se na interação entre campos magnéticos. De forma simplificada:
Estator: Cria um campo magnético fixo (usando ímanes permanentes ou eletroímanes).
Rotor (ou Armadura): Uma bobina de fio condutor montada num eixo. Quando a corrente contínua passa por esta bobina, gera-se um campo magnético.
Interação: O campo magnético do rotor interage com o campo magnético do estator, criando uma força (força de Lorentz) que faz o rotor girar.
Comutador e Escovas: Para manter a rotação contínua na mesma direção, um comutador mecânico e escovas invertem a direção da corrente na bobina do rotor no momento certo.
A velocidade de um motor DC simples é, em teoria, diretamente proporcional à tensão aplicada aos seus terminais, e o torque é proporcional à corrente que o atravessa. É esta relação entre tensão e velocidade que vamos explorar.
Porque Controlar a Velocidade?
Controlar a velocidade de um motor DC abre um leque vasto de possibilidades:
Robótica: Ajustar a velocidade de locomoção de um robô móvel.
Ventoinhas: Criar sistemas de arrefecimento ou ventilação com velocidade variável.
Bombas: Controlar o fluxo de líquidos em pequenos sistemas de bombagem.
Automação: Ajustar a velocidade de tapetes rolantes, braços mecânicos simples, etc.
Arte Cinética: Criar esculturas ou instalações com movimentos de velocidade variável.
Eficiência Energética: Reduzir a velocidade quando a potência máxima não é necessária, poupando energia.

2. O Papel Essencial do Arduino
O Arduino é a peça central que nos permite implementar o controlo de velocidade de forma inteligente e flexível.
O que é o Arduino?
Arduino é uma plataforma de prototipagem eletrónica de código aberto (open-source) baseada em hardware e software fáceis de usar. Consiste numa placa microcontroladora programável (como o popular Arduino Uno) e um ambiente de desenvolvimento integrado (IDE - Integrated Development Environment) que corre no seu computador, usado para escrever e carregar código para a placa.
Vantagens de Usar Arduino para Controlo de Motores
Facilidade de Uso: A linguagem de programação (baseada em C/C++) é simplificada e o IDE é intuitivo.
Custo Acessível: As placas Arduino e os componentes associados são relativamente baratos.
Grande Comunidade: Existe uma vasta comunidade online com tutoriais, exemplos de código e fóruns de suporte.
Flexibilidade: Permite implementar lógicas de controlo complexas, ler sensores e interagir com outros sistemas.
Pinos PWM: Muitas placas Arduino possuem pinos específicos capazes de gerar sinais PWM, essenciais para o nosso objetivo.
Pinos PWM: A Chave para o Controlo de Velocidade
Nem todos os pinos digitais do Arduino são iguais. Alguns, marcados com um til (~) ao lado do número (por exemplo, pinos 3, 5, 6, 9, 10, 11 no Arduino Uno), são capazes de gerar sinais PWM (Pulse Width Modulation). É esta capacidade que exploraremos para simular diferentes níveis de tensão e, consequentemente, controlar a velocidade do motor.
3. PWM (Pulse Width Modulation): O Conceito Fundamental
O PWM é a técnica padrão utilizada pelo Arduino (e muitos outros microcontroladores) para controlar a velocidade de motores DC e a intensidade de LEDs.
Desmistificando o PWM
Imagine que só pode ligar ou desligar completamente uma lâmpada. Como faria para que ela parecesse ter uma intensidade intermédia? Poderia ligá-la e desligá-la muito rapidamente. Se passar metade do tempo ligada e metade desligada, parecerá estar a 50% da sua luminosidade máxima. Se passar 80% do tempo ligada e 20% desligada, parecerá mais brilhante, perto dos 80%.
Isto é, essencialmente, PWM. É uma técnica para obter resultados analógicos (como diferentes níveis de brilho ou velocidade) usando meios digitais (ligado/desligado). O Arduino faz isto gerando uma onda quadrada digital (alternando entre 0V e 5V, ou HIGH e LOW) com uma frequência fixa, mas variando a largura dos pulsos (o tempo em que o sinal fica em HIGH).
Ciclo de Trabalho (Duty Cycle)
O parâmetro chave no PWM é o Ciclo de Trabalho (Duty Cycle). Representa a percentagem de tempo, dentro de um ciclo completo da onda, em que o sinal está no estado HIGH (ligado).
Duty Cycle 0%: O sinal está sempre em LOW (0V). O motor está parado.
Duty Cycle 50%: O sinal está metade do tempo em HIGH e metade em LOW. O motor recebe uma "tensão média" de cerca de metade da tensão máxima e roda a uma velocidade intermédia.
Duty Cycle 100%: O sinal está sempre em HIGH (5V). O motor recebe a tensão máxima (através do circuito de controlo) e roda à velocidade máxima.
Como o Arduino Gera PWM (analogWrite())
No Arduino, a função analogWrite(pino, valor) é usada para gerar um sinal PWM num dos pinos designados (~).
pino: O número do pino PWM que deseja usar.
valor: Um número inteiro entre 0 e 255.0 corresponde a um Duty Cycle de 0% (sempre LOW).
127 corresponde aproximadamente a um Duty Cycle de 50%.
255 corresponde a um Duty Cycle de 100% (sempre HIGH - embora na prática seja uma onda quadrada com pulso quase sempre no máximo).
A frequência padrão do PWM no Arduino Uno é de aproximadamente 490 Hz na maioria dos pinos PWM, e cerca de 980 Hz nos pinos 5 e 6. Esta frequência é geralmente alta o suficiente para que o motor responda à "tensão média" percebida, em vez de ligar e desligar visivelmente.
Aplicação do PWM em Motores DC
Ao aplicar um sinal PWM (através de um circuito intermediário, como veremos) a um motor DC, estamos efetivamente a ligá-lo e desligá-lo muito rapidamente. Devido à inércia mecânica do motor e às propriedades elétricas das suas bobinas, ele não pára e arranca instantaneamente. Em vez disso, integra a energia recebida durante os pulsos HIGH e a sua velocidade estabiliza num ponto que corresponde ao Duty Cycle do sinal PWM. Quanto maior o Duty Cycle, maior a "tensão média" percebida pelo motor e, consequentemente, maior a sua velocidade.
Importante: Nunca ligue um motor DC diretamente aos pinos do Arduino! Os pinos do Arduino têm uma capacidade de corrente muito limitada (tipicamente 20-40mA). Um motor DC, mesmo pequeno, consome muito mais corrente do que isso, especialmente no arranque. Ligar um motor diretamente a um pino do Arduino irá danificar permanentemente o pino ou a placa inteira. Precisamos de um circuito intermediário para lidar com a corrente do motor.

4. Componentes Necessários: O Seu Arsenal Eletrónico
Vamos listar os componentes essenciais para os nossos circuitos de controlo:
Placa Arduino: Qualquer placa Arduino com pinos PWM serve (Uno, Nano, Mega, etc.). O Arduino Uno é um excelente ponto de partida.
Motor DC Simples (Escovado): Escolha um motor adequado à sua aplicação. Verifique a sua tensão nominal (ex: 6V, 9V, 12V) e a corrente de operação (e a corrente de pico/stall). Certifique-se de que a sua fonte de alimentação e o circuito de controlo conseguem lidar com estas especificações.
Fonte de Alimentação Externa: Isto é crucial. Precisa de uma fonte de alimentação separada para o motor, com a tensão correta (igual ou ligeiramente inferior à tensão nominal do motor) e capacidade de corrente suficiente (superior à corrente máxima que o motor pode consumir). Pode ser uma fonte de bancada, um pack de pilhas, ou um adaptador de parede (wall wart). Lembre-se de ligar o GND (Terra) da fonte externa ao GND do Arduino.
Breadboard (Placa de Ensaio): Para montar o circuito sem soldadura.
Fios de Ligação (Jumper Wires): Para conectar os componentes na breadboard.
Componentes Específicos por Método:
Método 1: Controlo com Transístor Este método é mais simples e barato, ideal para controlo unidirecional (o motor só roda num sentido).
Transístor: Atua como um interruptor eletrónico controlado pelo sinal PWM do Arduino.Opção A: Transístor Bipolar de Junção (BJT) NPN: Como o TIP120 (Darlington) ou TIP31. Precisa de um resistor na base. É controlado por corrente.
Opção B: MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor) N-Channel: Como o IRF520, IRLZ44N (Logic Level), ou FQP30N06L (Logic Level). Geralmente mais eficientes que BJTs para comutação de motores e são controlados por tensão (mais fácil de interligar com Arduino, especialmente os "Logic Level" que ligam totalmente com 5V). Precisa de um resistor pull-down no gate (opcional mas recomendado).
Díodo Flyback (ou Freewheeling): ESSENCIAL! Um díodo como o 1N4001 ou 1N4007, ou um díodo Schottky (ex: 1N5817) que é mais rápido. Ligado em paralelo com o motor, mas com polaridade inversa. Protege o transístor contra picos de tensão gerados pela bobina do motor quando a corrente é cortada (colapso do campo magnético). Sem ele, o transístor pode queimar rapidamente.
Resistor:Se usar BJT: Um resistor de base (ex: 1kΩ) para limitar a corrente que entra na base do transístor vinda do pino do Arduino.
Se usar MOSFET: Um resistor pull-down (ex: 10kΩ) entre o Gate e o GND para garantir que o MOSFET desliga quando o pino do Arduino está em estado indefinido (ex: durante o boot). Um pequeno resistor de gate (ex: 100Ω) em série com o pino do Arduino pode prevenir oscilações (opcional para baixas frequências PWM).
Método 2: Controlo com Driver de Motor (Ponte H) Este método é um pouco mais complexo e caro, mas oferece vantagens significativas, incluindo o controlo bidirecional (o motor pode rodar nos dois sentidos) e maior capacidade de corrente. Usa um circuito integrado chamado Ponte H.
Módulo Driver de Motor: Um módulo pronto a usar que contém a Ponte H e circuitos de proteção. Exemplos populares:L298N: Muito comum, robusto, consegue controlar dois motores DC independentemente (ou um motor de passo). Tem alguma queda de tensão e pode aquecer.
L293D: Semelhante ao L298N, mas com menor capacidade de corrente e díodos flyback internos (embora díodos externos sejam por vezes recomendados para melhor proteção).
Drivers baseados em MOSFET (ex: TB6612FNG): Mais eficientes (menor queda de tensão, menos calor) e mais compactos que o L298N, mas geralmente com menor capacidade de corrente.
Estes módulos simplificam a cablagem, pois já integram os transístores (ou MOSFETs) e, muitas vezes, os díodos de proteção.

5. Montagem do Circuito: Mãos à Obra!
Atenção: Desligue sempre a alimentação do Arduino e da fonte externa antes de fazer ou modificar ligações no circuito. Verifique as ligações múltiplas vezes antes de ligar a energia.
Circuito 1: Controlo de Velocidade com Transístor (Usando MOSFET N-Channel como exemplo)
Este circuito permite controlar a velocidade num único sentido.
Componentes: Arduino, Motor DC, Fonte Externa, MOSFET N-Channel (ex: IRLZ44N), Díodo Flyback (ex: 1N4007), Resistor 10kΩ (pull-down), Breadboard, Fios.
Diagrama de Ligação (Descrição):
Alimentação do Motor:Ligue o terminal positivo (+) da fonte de alimentação externa ao terminal positivo (+) do motor DC.
Ligue o terminal negativo (-) da fonte de alimentação externa ao pino Source (S) do MOSFET.
IMPORTANTE: Ligue também o terminal negativo (-) da fonte de alimentação externa a um pino GND do Arduino. Esta ligação de terra comum é essencial.
Ligação Motor-MOSFET:Ligue o terminal negativo (-) do motor DC ao pino Drain (D) do MOSFET.
Ligação Arduino-MOSFET:Escolha um pino PWM do Arduino (ex: pino ~9). Ligue este pino ao pino Gate (G) do MOSFET.
Ligue o resistor de 10kΩ entre o pino Gate (G) do MOSFET e o GND (do Arduino ou da fonte externa, pois estão ligados). Este é o resistor pull-down.
Díodo Flyback:Ligue o díodo em paralelo com os terminais do motor. A faixa no corpo do díodo (cátodo) deve estar ligada ao lado positivo (+) do motor (que vem da fonte externa). O outro lado do díodo (ânodo) deve estar ligado ao lado negativo (-) do motor (que vai para o Drain do MOSFET). A POLARIDADE É CRUCIAL! Se ligado ao contrário, causará um curto-circuito.
Verificação:
GNDs comuns (Arduino e Fonte Externa).
Motor entre V+ da fonte e Drain do MOSFET.
Source do MOSFET ao GND da fonte.
Gate do MOSFET ao pino PWM do Arduino (com resistor pull-down para GND).
Díodo Flyback em paralelo com o motor, cátodo (faixa) para o V+.
Circuito 2: Controlo de Velocidade com Driver de Motor L298N
Este circuito permite controlo de velocidade e direção.
Componentes: Arduino, Motor DC, Fonte Externa, Módulo L298N, Breadboard, Fios.
Diagrama de Ligação (Descrição - usando um canal do L298N):
Alimentação do Módulo L298N:Ligue o terminal positivo (+) da fonte de alimentação externa (ex: 6V a 12V, dependendo do motor) ao terminal VMS ou +12V do módulo L298N.
Ligue o terminal negativo (-) da fonte de alimentação externa ao terminal GND do módulo L298N.
IMPORTANTE: Ligue também o terminal GND do módulo L298N a um pino GND do Arduino.
Alimentação Lógica (Opcional - Jumper):O L298N tem geralmente um jumper perto do terminal +5V.
Se a sua fonte externa for > 7.5V e < 35V: Pode manter o jumper. O módulo tem um regulador 5V interno que pode alimentar a lógica do próprio módulo e até fornecer 5V ao Arduino (ligando o +5V do L298N ao VIN do Arduino - cuidado com a corrente).
Se a sua fonte externa for < 7.5V ou se preferir alimentar a lógica separadamente: Remova o jumper e ligue o pino +5V do módulo L298N ao pino 5V do Arduino.
Ligação do Motor:Ligue os dois terminais do motor DC aos terminais OUT1 e OUT2 (ou OUT3 e OUT4 se usar o outro canal) do módulo L298N. A ordem determinará o sentido "para a frente".
Ligação de Controlo Arduino-L298N:Escolha um pino PWM do Arduino (ex: pino ~9). Ligue este pino ao terminal ENA (Enable A) do módulo L298N. Este pino controlará a velocidade do motor A.
Escolha dois pinos digitais quaisquer do Arduino (ex: pinos 7 e 8). Ligue estes pinos aos terminais IN1 e IN2 do módulo L298N. Estes pinos controlarão a direção do motor A.
(Se estivesse a usar o segundo motor, ligaria ENB a outro pino PWM, e IN3/IN4 a outros dois pinos digitais).
Verificação:
GNDs comuns (Arduino, Fonte Externa, L298N).
Alimentação do motor (VMS/GND) ligada corretamente.
Alimentação lógica (5V) tratada (jumper ou ligação ao 5V do Arduino).
Motor ligado a OUT1/OUT2.
Pino PWM do Arduino a ENA.
Pinos digitais do Arduino a IN1/IN2.
6. Programação com Arduino IDE: Dando Vida ao Projeto
Agora que os circuitos estão montados, vamos escrever o código (sketch) para o Arduino.
Configuração Inicial do Ambiente
Abra o Arduino IDE no seu computador.
Selecione a placa correta em Ferramentas > Placa.
Selecione a porta COM correta em Ferramentas > Porta.
Código Exemplo 1: Controlo Básico com Transístor/MOSFET
Este código fará o motor aumentar gradualmente a velocidade, diminuir e repetir.
C++
// --- Controlo de Velocidade de Motor DC com Transístor/MOSFET ---
// Define o pino PWM do Arduino ligado ao Gate do MOSFET (ou Base do BJT via resistor)
const int motorPin = 9; // Usar um pino com ~ (PWM)
void setup() {
// Configura o pino do motor como saída
pinMode(motorPin, OUTPUT);
// Inicia a comunicação serial para debugging (opcional)
Serial.begin(9600);
Serial.println("Teste de Controlo de Velocidade com Transistor/MOSFET");
}
void loop() {
// Aumenta a velocidade gradualmente (0 a 255)
Serial.println("Aumentando velocidade...");
for (int velocidade = 0; velocidade <= 255; velocidade++) {
analogWrite(motorPin, velocidade); // Define o duty cycle do PWM
delay(20); // Pequena pausa para ver a mudança
}
Serial.println("Velocidade Máxima Atingida.");
delay(1000); // Mantém na velocidade máxima por 1 segundo
// Diminui a velocidade gradualmente (255 a 0)
Serial.println("Diminuindo velocidade...");
for (int velocidade = 255; velocidade >= 0; velocidade--) {
analogWrite(motorPin, velocidade); // Define o duty cycle do PWM
delay(20); // Pequena pausa para ver a mudança
}
Serial.println("Motor Parado.");
delay(1000); // Mantém parado por 1 segundo
}
Explicação:
const int motorPin = 9;: Define uma constante para o pino PWM usado (pino 9).
pinMode(motorPin, OUTPUT);: Configura o pino 9 como saída digital no setup().
Serial.begin(9600);: Inicia a comunicação serial (útil para ver mensagens no Monitor Serial do Arduino IDE).
analogWrite(motorPin, velocidade);: Esta é a função chave. Envia um sinal PWM para o motorPin com um duty cycle determinado pelo valor da variável velocidade (0 a 255).
O loop() usa dois ciclos for para variar o valor de velocidade de 0 a 255 e depois de 255 a 0, alterando assim a velocidade do motor.
delay(): Pausas para tornar o efeito visível.
Código Exemplo 2: Controlo Básico com L298N
Este código demonstra como controlar a velocidade e a direção usando o L298N.
C++
// --- Controlo de Velocidade e Direção com L298N ---
// Define os pinos de controlo para o Motor A do L298N
const int enablePinA = 9; // Ligado ao ENA (Deve ser um pino PWM ~)
const int inputPin1 = 8; // Ligado ao IN1
const int inputPin2 = 7; // Ligado ao IN2
void setup() {
// Configura os pinos como saída
pinMode(enablePinA, OUTPUT);
pinMode(inputPin1, OUTPUT);
pinMode(inputPin2, OUTPUT);
// Garante que o motor começa parado
digitalWrite(inputPin1, LOW);
digitalWrite(inputPin2, LOW);
analogWrite(enablePinA, 0); // Velocidade zero
// Inicia a comunicação serial (opcional)
Serial.begin(9600);
Serial.println("Teste de Controlo com L298N");
}
void loop() {
// --- Rodar num sentido (Ex: Frente) ---
Serial.println("Rodando para a Frente - Acelerando");
digitalWrite(inputPin1, HIGH); // Define a direção
digitalWrite(inputPin2, LOW);
for (int velocidade = 0; velocidade <= 255; velocidade++) {
analogWrite(enablePinA, velocidade); // Aumenta a velocidade
delay(20);
}
Serial.println("Velocidade Máxima (Frente)");
delay(1000);
Serial.println("Rodando para a Frente - Desacelerando");
for (int velocidade = 255; velocidade >= 0; velocidade--) {
analogWrite(enablePinA, velocidade); // Diminui a velocidade
delay(20);
}
Serial.println("Motor Parado");
// Para completamente o motor (boa prática antes de inverter)
digitalWrite(inputPin1, LOW);
digitalWrite(inputPin2, LOW);
delay(1000);
// --- Rodar no outro sentido (Ex: Trás) ---
Serial.println("Rodando para Trás - Acelerando");
digitalWrite(inputPin1, LOW); // Inverte a direção
digitalWrite(inputPin2, HIGH);
for (int velocidade = 0; velocidade <= 255; velocidade++) {
analogWrite(enablePinA, velocidade); // Aumenta a velocidade
delay(20);
}
Serial.println("Velocidade Máxima (Trás)");
delay(1000);
Serial.println("Rodando para Trás - Desacelerando");
for (int velocidade = 255; velocidade >= 0; velocidade--) {
analogWrite(enablePinA, velocidade); // Diminui a velocidade
delay(20);
}
Serial.println("Motor Parado");
// Para completamente o motor
digitalWrite(inputPin1, LOW);
digitalWrite(inputPin2, LOW);
delay(1000);
}
Explicação:
Definimos 3 pinos: enablePinA (PWM para velocidade), inputPin1 e inputPin2 (Digitais para direção).
Controlo de Direção:IN1=HIGH, IN2=LOW: Roda num sentido.
IN1=LOW, IN2=HIGH: Roda no sentido oposto.
IN1=LOW, IN2=LOW (ou IN1=HIGH, IN2=HIGH): Travão rápido (freio motor).
Controlo de Velocidade: A função analogWrite(enablePinA, velocidade) controla a velocidade, independentemente da direção definida por IN1 e IN2. O valor velocidade (0-255) aplica o PWM ao pino Enable.
O código alterna entre as duas direções, acelerando e desacelerando em cada uma.
Código Exemplo 3: Controlo Interativo com Potenciómetro
Vamos adicionar um potenciómetro para controlar manualmente a velocidade do motor (usando o circuito do transístor como base, mas adaptável ao L298N).
Componentes Adicionais: Potenciómetro (ex: 10kΩ).
Ligação do Potenciómetro:
Ligue um dos pinos externos do potenciómetro ao pino 5V do Arduino.
Ligue o outro pino externo do potenciómetro ao pino GND do Arduino.
Ligue o pino central (wiper/cursor) do potenciómetro a um pino de entrada analógica do Arduino (ex: A0).
C++
// --- Controlo de Velocidade Interativo com Potenciómetro ---
// (Baseado no circuito com Transístor/MOSFET)
// Pino PWM para o motor
const int motorPin = 9;
// Pino Analógico para ler o potenciómetro
const int potPin = A0;
int valorPotenciometro = 0; // Variável para armazenar o valor lido
int velocidadeMotor = 0; // Variável para armazenar a velocidade calculada
void setup() {
pinMode(motorPin, OUTPUT);
Serial.begin(9600);
Serial.println("Controlo de Velocidade com Potenciómetro");
}
void loop() {
// 1. Ler o valor do potenciómetro
valorPotenciometro = analogRead(potPin); // Lê um valor entre 0 e 1023
// 2. Mapear o valor lido (0-1023) para a gama do PWM (0-255)
velocidadeMotor = map(valorPotenciometro, 0, 1023, 0, 255);
// 3. Aplicar a velocidade ao motor
analogWrite(motorPin, velocidadeMotor);
// 4. Imprimir os valores no Monitor Serial (para debugging)
Serial.print("Valor Pot: ");
Serial.print(valorPotenciometro);
Serial.print(" -> Velocidade PWM: ");
Serial.println(velocidadeMotor);
delay(50); // Pequena pausa para não sobrecarregar o serial e estabilizar a leitura
}
Explicação:
const int potPin = A0;: Define o pino analógico onde o potenciómetro está ligado.
valorPotenciometro = analogRead(potPin);: Lê a tensão no pino A0, que varia conforme roda o potenciómetro. O Arduino converte esta tensão num valor digital entre 0 (para 0V) e 1023 (para 5V).
velocidadeMotor = map(valorPotenciometro, 0, 1023, 0, 255);: A função map() é muito útil aqui. Ela re-escala um número de uma gama para outra. Neste caso, converte o valor lido do potenciómetro (0-1023) para a gama que a função analogWrite() aceita (0-255).
analogWrite(motorPin, velocidadeMotor);: Define a velocidade do motor com base no valor mapeado do potenciómetro.
Agora, ao rodar o potenciómetro, a velocidade do motor deve variar em tempo real.
Adaptação para L298N: Para usar este código com o L298N, basta substituir motorPin por enablePinA e adicionar a lógica de controlo de direção (IN1/IN2) se necessário (pode fixar uma direção ou controlá-la com botões, por exemplo).
7. Testes, Ajustes e Resolução de Problemas (Troubleshooting)
É comum encontrar alguns percalços ao montar circuitos eletrónicos. Aqui ficam algumas dicas:
O Motor Não Roda:Verificar Ligações: A causa mais comum. Reveja cada fio, especialmente GNDs, V+ e ligações ao transístor/driver.
Verificar Alimentação: A fonte externa está ligada e a fornecer a tensão correta? O motor está a receber energia? Use um multímetro. O Arduino está ligado e com o LED ON aceso?
Verificar Código: O código foi carregado corretamente? Está a usar o pino PWM correto? O valor PWM enviado é > 0? Use Serial.print() para verificar os valores das variáveis.
Verificar Componentes: O transístor ou driver podem ter queimado (especialmente se esqueceu o díodo flyback ou ligou algo incorretamente). Tente substituir o componente suspeito. O motor funciona se ligado diretamente à fonte externa (por breves instantes)?
No L298N: Verificou os pinos Enable (ENA/ENB)? Estão a receber um sinal PWM? Os pinos IN1/IN2 estão configurados para permitir rotação (não ambos LOW ou ambos HIGH simultaneamente)?
Velocidade Incorreta ou Sempre no Máximo:Verificar Sinal PWM: O analogWrite() está a receber o valor correto? No código com potenciómetro, verifique se analogRead() e map() estão a funcionar como esperado (use Serial.print()).
Curto-circuito no Transístor? Se usar um transístor, ele pode ter falhado em modo de curto-circuito (sempre a conduzir).
Ligação do Potenciómetro: Se usar um, verifique se está bem ligado (5V, GND, A0).
Arduino Reinicia ou Comportamento Instável:Problema de Alimentação: Frequentemente causado pelo motor a puxar demasiada corrente, causando quedas de tensão que afetam o Arduino. Certifique-se ABSOLUTAMENTE que o motor NÃO está a ser alimentado pelo pino 5V ou Vin do Arduino. Use uma fonte externa dedicada para o motor com GND comum ao Arduino.
Ruído Elétrico: Motores DC (especialmente os escovados) geram muito ruído elétrico. Adicionar condensadores de cerâmica (ex: 0.1uF) em paralelo com os terminais do motor e entre cada terminal e a carcaça do motor pode ajudar a filtrar este ruído.
Aquecimento Excessivo de Componentes:Transístor/Driver Subdimensionado: O componente não aguenta a corrente exigida pelo motor. Verifique os datasheets e a corrente de stall do motor.
Falta de Dissipador: Componentes como o TIP120 ou L298N podem precisar de um dissipador de calor, especialmente com correntes elevadas ou PWM com duty cycles que os fazem operar na região linear (menos eficiente).
Díodo Flyback em Falta ou Invertido: Causa stress excessivo no transístor/driver.
PWM de Baixa Frequência: Pode causar mais aquecimento em alguns casos.
8. Otimização e Considerações Avançadas
Para projetos mais robustos ou exigentes:
Escolha Criteriosa do Transístor ou Driver:Corrente: Escolha um componente cuja corrente contínua máxima seja significativamente superior à corrente nominal do motor, e que suporte a corrente de pico (stall current).
Tensão: Deve suportar a tensão da fonte de alimentação do motor.
Tipo: MOSFETs "Logic Level" são ideais para controlo direto pelo Arduino 5V. Para correntes mais altas, drivers dedicados (Ponte H) são geralmente preferíveis.
RDS(on) (MOSFETs): Resistência quando ligado. Quanto menor, menos energia é dissipada como calor no MOSFET.
Queda de Tensão (BJTs, L298N): O L298N pode ter uma queda de tensão de 2V ou mais, o que significa que o motor nunca recebe a tensão total da fonte e o driver dissipa essa diferença como calor. Drivers baseados em MOSFET (como o TB6612FNG) são muito mais eficientes.
A Importância dos Dissipadores de Calor: Se o transístor ou driver aquecerem muito ao toque, adicione um dissipador de calor adequado para evitar sobreaquecimento e falha.
Frequência do PWM:A frequência padrão do Arduino (490/980 Hz) é geralmente aceitável.
Frequências mais baixas podem tornar o controlo menos suave e causar ruído audível no motor.
Frequências mais altas (> 20kHz, acima da audição humana) podem reduzir o ruído audível e, em alguns casos, melhorar a eficiência, mas também podem aumentar as perdas por comutação no transístor/driver. É possível alterar a frequência PWM do Arduino, mas requer manipulação direta dos timers do microcontrolador (tópico avançado).
Introdução ao Controlo em Malha Fechada (Feedback): O controlo que fizemos até agora é "malha aberta" - definimos uma velocidade (via PWM) e esperamos que o motor a atinja. No entanto, a velocidade real pode variar com a carga aplicada ao motor. Para um controlo preciso da velocidade real, precisamos de feedback. Isto envolve usar um sensor (como um encoder rotativo acoplado ao eixo do motor) para medir a velocidade real e ajustar o valor PWM dinamicamente (usando algoritmos como PID - Proporcional, Integral, Derivativo) para manter a velocidade desejada, independentemente da carga. Este é um passo significativo em complexidade.
Filtragem de Ruído Elétrico: Como mencionado, motores DC geram ruído. Adicionar condensadores de bypass (ex: 0.1uF cerâmico) perto dos terminais de alimentação do L298N ou do transístor, e diretamente nos terminais do motor, pode ajudar a estabilizar o sistema e reduzir a interferência com o Arduino ou outros componentes sensíveis.
9. Aplicações Práticas e Ideias para Projetos
Agora que sabe controlar a velocidade, pode aplicar este conhecimento em diversos projetos:
Robô Seguidor de Linha: Ajuste a velocidade dos motores para curvas suaves.
Robô que Evita Obstáculos: Reduza a velocidade ao aproximar-se de um obstáculo.
Ventoinha Inteligente: Aumente a velocidade da ventoinha com base na leitura de um sensor de temperatura.
Mini Bomba de Água: Controle o fluxo de água para um sistema de rega automático.
Cortina Automatizada: Abra e feche cortinas suavemente com velocidade controlada.
Misturador Pequeno: Crie um pequeno misturador com velocidade ajustável.
Plataforma Giratória para Fotografia: Rode objetos lentamente e com velocidade constante.
10. Conclusão: O Poder do Controlo na Ponta dos Dedos
Controlar a velocidade de um motor DC simples com Arduino é uma porta de entrada fantástica para o mundo da mecatrónica e automação. Utilizando a técnica de PWM e componentes simples como transístores ou módulos driver como o L298N, é possível obter um controlo eficaz e flexível sobre o movimento.
Compreender os princípios do PWM, a importância da alimentação separada, a função protetora do díodo flyback e a escolha correta dos componentes são passos cruciais para o sucesso. Os exemplos de código fornecidos servem como um ponto de partida sólido para os seus próprios projetos.
Não tenha medo de experimentar, testar e resolver problemas. A eletrónica DIY é um processo de aprendizagem contínuo. Ao dominar o controlo de velocidade, estará bem equipado para criar projetos mais dinâmicos, interativos e eficientes. O próximo passo natural pode ser explorar o controlo bidirecional (se ainda não o fez com o L298N) ou até mesmo aventurar-se no controlo em malha fechada para uma precisão ainda maior. Boa Sorte e Boas Construções!
11. FAQ (Perguntas Frequentes)
P: Posso ligar um motor DC pequeno diretamente a um pino digital do Arduino?R: NÃO, NUNCA! Mesmo motores pequenos consomem mais corrente do que um pino do Arduino pode fornecer em segurança (tipicamente > 40mA). Irá danificar o pino ou o microcontrolador. Use sempre um circuito intermediário (transístor ou driver de motor).
P: Qual a diferença entre digitalWrite() e analogWrite() para controlar um motor?R: digitalWrite(pino, HIGH) liga o pino completamente (5V), digitalWrite(pino, LOW) desliga-o (0V). Isto só permite ligar/desligar o motor na velocidade máxima (através do circuito de controlo). analogWrite(pinoPWM, valor) gera um sinal PWM num pino compatível (~), permitindo controlar a velocidade "média" fornecida ao motor, variando o valor de 0 a 255.
P: Preciso mesmo do díodo flyback quando uso um transístor?R: SIM, ABSOLUTAMENTE. A bobina do motor armazena energia magnética. Quando a corrente é cortada (o transístor desliga), essa energia tem de ir para algum lado, criando um pico de tensão inversa elevado que pode destruir o transístor instantaneamente. O díodo flyback fornece um caminho seguro para essa corrente circular e dissipar-se, protegendo o transístor.
P: O L298N é a única opção de driver de motor (Ponte H)?R: Não. É muito popular e barato, mas existem alternativas mais modernas e eficientes, como o TB6612FNG (menor, mais eficiente, mas menos corrente) ou drivers baseados em MOSFETs mais potentes para motores maiores. A escolha depende dos requisitos de corrente, tensão, eficiência e tamanho do seu projeto.
P: Como escolher a fonte de alimentação externa correta para o motor?R: Verifique a tensão nominal de operação do motor (ex: 6V, 12V). A fonte deve fornecer essa tensão. Verifique a corrente de operação e, mais importante, a corrente de stall (corrente máxima quando o eixo está bloqueado). A fonte de alimentação deve ser capaz de fornecer, pelo menos, a corrente de operação contínua, e idealmente, uma corrente máxima superior à corrente de stall para lidar com arranques e cargas pesadas. Por exemplo, se um motor de 12V consome 500mA em operação normal e 2A em stall, uma fonte de 12V com capacidade de 2A ou mais seria uma escolha segura.