
Guia Completo de Sensores e Módulos Essenciais para Robótica
A robótica deixou de ser um conceito futurista para se tornar uma realidade cada vez mais presente no nosso quotidiano, na indústria, na investigação e até mesmo no hobby. Desde linhas de montagem automatizadas em fábricas portuguesas até pequenos robôs educativos construídos por estudantes, a base de qualquer sistema robótico funcional reside na sua capacidade de perceber o ambiente e agir sobre ele. É aqui que entram os sensores e módulos, os verdadeiros "sentidos" e "órgãos" dos robôs.
Se está a dar os primeiros passos no fascinante mundo da robótica em Portugal, seja como estudante, entusiasta ou profissional, compreender os diferentes tipos de sensores e módulos disponíveis é crucial. Este guia completo, otimizado para o contexto português, visa desmistificar estes componentes, explicando o que são, como funcionam e quais os mais importantes a considerar para os seus projetos. Com mais de 3000 palavras, exploraremos em detalhe o universo dos componentes que dão vida aos robôs.
O Papel Fundamental dos Sensores na Robótica
Imagine tentar navegar numa sala escura ou pegar num objeto sem poder ver ou sentir. Seria incrivelmente difícil, certo? Os robôs enfrentam desafios semelhantes. Sem sensores, um robô é essencialmente "cego" e "surdo" ao seu ambiente.
Sensores em robótica são dispositivos que detetam e medem propriedades físicas do ambiente ou do próprio robô, convertendo essa informação em sinais elétricos que podem ser interpretados por um microcontrolador (o "cérebro" do robô). Eles são a ponte entre o mundo físico e o mundo digital do processamento do robô.
A função principal dos sensores é fornecer dados. Estes dados permitem ao robô:
Perceber o Ambiente: Detetar obstáculos, seguir linhas, medir distâncias, identificar cores, sentir temperatura, etc.
Navegar: Localizar-se no espaço, planear trajetórias e evitar colisões.
Interagir: Detetar contacto, aplicar a força correta, reconhecer objetos ou pessoas.
Monitorizar o seu Próprio Estado: Verificar a posição das suas juntas, a velocidade dos motores, o nível da bateria, a sua orientação.
A escolha dos sensores certos é determinante para o sucesso de qualquer projeto de robótica, influenciando diretamente as capacidades e a inteligência do robô.
Categorias Principais de Sensores Robóticos
Podemos classificar os sensores de várias formas, mas uma divisão útil é entre sensores internos (proprioceptivos) e externos (exteroceptivos).
Sensores Internos (Proprioceptivos): Monitorizam o estado interno do robô. Exemplos incluem encoders que medem a rotação dos motores, sensores de corrente para monitorizar o consumo de energia, sensores de tensão da bateria e unidades de medição inercial (IMUs) que medem a orientação e aceleração do robô.
Sensores Externos (Exteroceptivos): Recolhem informação sobre o ambiente externo ao robô. Esta é a categoria mais vasta e inclui sensores de distância, de luz, de contacto, de temperatura, câmaras, microfones, etc.
Neste guia, focaremos principalmente nos sensores externos e internos mais comuns e essenciais para a maioria dos projetos de robótica acessíveis em Portugal.
Tipos Essenciais de Sensores para Robótica
Vamos mergulhar nos tipos específicos de sensores que formam a base da perceção robótica.
1. Sensores de Distância/Proximidade
Estes são talvez os sensores mais fundamentais para a navegação e interação. Permitem ao robô "ver" obstáculos e medir quão longe estão.
Sensores Ultrassónicos:Como Funcionam: Emitem um pulso sonoro de alta frequência (inaudível para humanos) e medem o tempo que leva para o eco retornar após refletir num objeto. A distância é calculada com base na velocidade do som.
Aplicações: Deteção de obstáculos em robôs móveis (muito comuns em projetos com Arduino), medição de nível de líquidos em tanques, sistemas de estacionamento.
Considerações: Têm um "cone" de deteção (não um ponto único), podem ser afetados por superfícies macias que absorvem o som ou por ângulos muito acentuados. A precisão pode variar com a temperatura e humidade.
Exemplo Popular: HC-SR04 (amplamente disponível e acessível em Portugal).
Sensores de Infravermelhos (IR) de Proximidade:Como Funcionam: Emitem um feixe de luz infravermelha e detetam a reflexão dessa luz num objeto próximo. Podem ser simples (deteção on/off) ou analógicos (dando uma estimativa da distância baseada na intensidade da reflexão).
Aplicações: Deteção de obstáculos a curta distância, seguimento de linhas (sensores IR apontados para o chão detetam a diferença de reflexão entre uma linha preta e uma superfície branca), contagem de objetos.
Considerações: Sensíveis à luz ambiente (especialmente luz solar direta), a cor e refletividade da superfície do objeto influenciam a leitura. Têm geralmente um alcance mais curto que os ultrassónicos.
Exemplo Popular: Sharp GP2Y0Axx series (oferecem saída analógica proporcional à distância), módulos TCRT5000 (comuns para seguidores de linha).
Sensores LiDAR (Light Detection and Ranging):Como Funcionam: Funcionam de forma semelhante ao radar, mas usam pulsos de laser. Medem o tempo que a luz demora a retornar (Time-of-Flight - ToF) ou usam outras técnicas como triangulação laser. Podem ser 1D (ponto único), 2D (varrimento num plano, criando um "mapa" à volta do robô) ou 3D (varrimento tridimensional).
Aplicações: Mapeamento e localização simultânea (SLAM) em robôs autónomos, carros autónomos, drones, robótica industrial.
Considerações: Geralmente mais caros e complexos que os ultrassónicos ou IR, mas oferecem maior alcance, precisão e resolução. Os LiDAR 2D e 3D geram grandes volumes de dados que exigem mais poder de processamento.
Exemplo Popular: RPLIDAR (gama popular para robótica de hobby e investigação), sensores ToF de ponto único como o VL53L0X (pequenos e acessíveis).
2. Sensores de Luz
Permitem ao robô detetar a presença e intensidade da luz ambiente ou fontes de luz específicas.
Fotorresistências (LDR - Light Dependent Resistor):Como Funcionam: São resistências cujo valor óhmico diminui com o aumento da intensidade luminosa incidente. São componentes analógicos simples.
Aplicações: Deteção dia/noite, robôs que seguem fontes de luz, ajuste automático de brilho (embora menos precisos que outros sensores para esta função).
Considerações: Resposta relativamente lenta, sensibilidade espectral limitada, variação entre componentes. Muito baratos e fáceis de usar.
Fototransístores e Fotodíodos:Como Funcionam: Semicondutores que geram uma corrente ou tensão proporcional à intensidade da luz incidente. Mais rápidos e sensíveis que os LDRs.
Aplicações: Deteção de luz ambiente, comunicação ótica (como em recetores de controlo remoto IR), sensores de ranhura (opto-interrupters) para deteção de passagem ou contagem.
Considerações: Requerem circuitos de condicionamento adequados. Existem versões que respondem a espectros específicos (visível, IR, UV).
Sensores de Luz Ambiente e Cor (ALS - Ambient Light Sensor):Como Funcionam: Circuitos integrados mais complexos que medem a iluminância (em lux) de forma mais precisa e, por vezes, a temperatura de cor ou até mesmo a cor (RGB) da luz ou de superfícies.
Aplicações: Ajuste automático de brilho de ecrãs em robôs com interfaces visuais, robôs que precisam de distinguir cores (ex: seleção de objetos), análise de condições de iluminação.
Considerações: Interface digital (geralmente I2C), maior precisão e estabilidade que LDRs/Fototransístores.
Exemplo Popular: TCS3200/TCS34725 (sensores de cor), BH1750 (sensor de luz ambiente).
3. Sensores de Movimento/Presença
Utilizados para detetar movimento de pessoas ou objetos no campo de visão do robô.
Sensores PIR (Passive Infrared):Como Funcionam: Detetam alterações na radiação infravermelha emitida por corpos quentes (como humanos ou animais) que se movem no seu campo de visão. São "passivos" porque não emitem radiação, apenas a detetam.
Aplicações: Sistemas de segurança e alarme, ativação de luzes ou mecanismos quando alguém se aproxima, robôs de vigilância.
Considerações: Detetam apenas movimento, não presença estática. Sensíveis a mudanças rápidas de temperatura ambiente. Têm um tempo de "aquecimento" e um período de "bloqueio" após a deteção.
Exemplo Popular: HC-SR501 (muito comum e barato).
4. Unidades de Medição Inercial (IMU - Inertial Measurement Unit)
Estes sensores são cruciais para robôs que precisam de saber a sua orientação e movimento no espaço (especialmente robôs móveis, drones, braços robóticos).
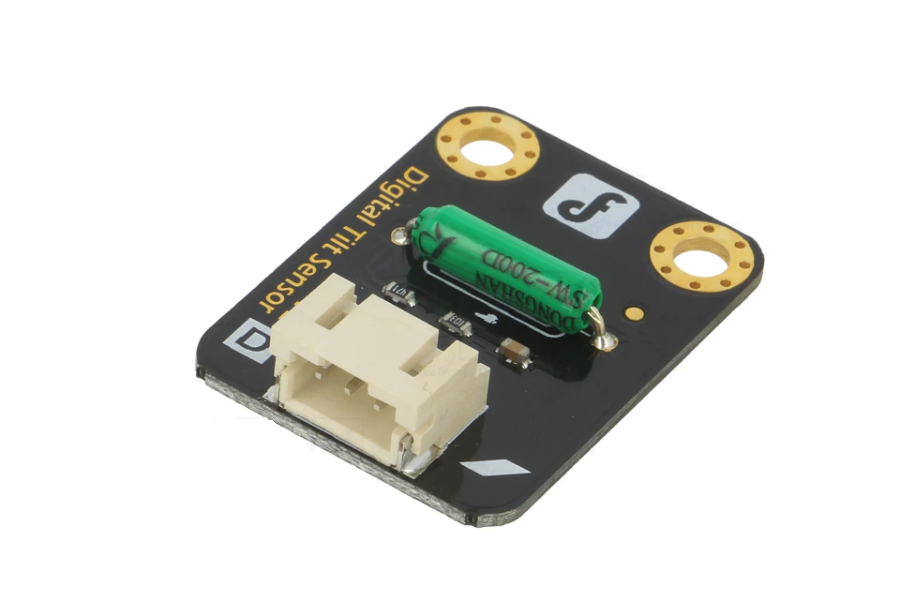
Componentes: Uma IMU combina tipicamente vários sensores num único chip ou módulo:Acelerómetro: Mede a aceleração linear (incluindo a aceleração da gravidade, que permite determinar a inclinação). Geralmente mede em 3 eixos (X, Y, Z).
Giroscópio: Mede a velocidade angular (taxa de rotação) em 3 eixos. Essencial para detetar rotações.
Magnetómetro (opcional): Mede o campo magnético terrestre, funcionando como uma bússola digital para determinar a orientação absoluta (Norte).
Como Funcionam: Utilizam princípios microeletromecânicos (MEMS) para detetar movimento e orientação.
Aplicações: Estabilização de drones e robôs de equilíbrio (como Segways), navegação inercial (estimativa de posição baseada em acelerações e rotações - sujeito a deriva), controlo de orientação de braços robóticos, interfaces de movimento.
Considerações: Os dados brutos dos sensores individuais são ruidosos e sujeitos a deriva (erros acumulam-se ao longo do tempo). IMUs mais avançadas (9-DOF ou 10-DOF com barómetro) incluem algoritmos de fusão de sensores (como filtros de Kalman ou Madgwick/Mahony) no próprio chip ou requerem processamento externo para combinar os dados e obter uma estimativa de orientação mais estável e precisa ( ângulos de Euler, quaternions).
Exemplo Popular: MPU-6050 (IMU 6-DOF muito popular com acelerómetro e giroscópio, acessível), MPU-9250 (9-DOF com magnetómetro), BNO055 (IMU 9-DOF com fusão de sensores integrada).
5. Encoders (Codificadores Rotativos/Lineares)
São sensores internos essenciais para medir a posição e/ou velocidade de motores e juntas.
Encoders Rotativos:Como Funcionam: Montados no eixo de um motor, detetam a rotação. Podem ser:Incrementais: Geram pulsos à medida que o eixo roda (ex: A e B em quadratura para detetar direção e contar passos). Não sabem a posição absoluta ao ligar.
Absolutos: Fornecem um código digital único para cada posição angular, sabendo sempre a posição exata, mesmo após desligar/ligar.
Aplicações: Controlo preciso da velocidade e posição de motores DC ou rodas em robôs móveis (odometria), controlo de juntas em braços robóticos.
Considerações: Requerem contagem de pulsos de alta frequência (encoders incrementais) ou leitura de códigos complexos (encoders absolutos). A resolução (pulsos por rotação) determina a precisão.
Encoders Lineares: Funcionam de forma semelhante, mas medem o deslocamento linear ao longo de uma escala. Menos comuns em robótica de hobby, mais usados em máquinas CNC e robótica industrial de alta precisão.
6. Sensores de Temperatura e Humidade
Embora nem sempre essenciais para a função principal do robô, podem ser importantes para monitorização ambiental ou segurança.
Como Funcionam: Utilizam termístores, termopares, semicondutores ou sensores capacitivos (para humidade) para medir as condições ambientais.
Aplicações: Robôs meteorológicos, monitorização de condições em estufas ou ambientes controlados, deteção de sobreaquecimento em componentes eletrónicos ou motores.
Considerações: Existem sensores analógicos (termístores) e digitais (com interface I2C ou One-Wire) que combinam frequentemente medição de temperatura e humidade.
Exemplo Popular: DHT11 / DHT22 (sensores combinados de temperatura e humidade, digitais, muito populares e acessíveis, o DHT22 é mais preciso), DS18B20 (sensor de temperatura digital com interface One-Wire, à prova de água em algumas versões).
7. Sensores de Força/Pressão/Tácteis
Permitem ao robô "sentir" o contacto físico e medir a força aplicada.
Sensores de Força Resistivos (FSR - Force Sensitive Resistor):Como Funcionam: A sua resistência elétrica diminui à medida que a pressão aplicada na sua superfície aumenta. São sensores analógicos.
Aplicações: Deteção de contacto em garras de robôs ("sentir" quando agarrou um objeto), botões sensíveis à pressão, medição de peso (com calibração).
Considerações: Geralmente não são muito precisos para medição de força exata, mais adequados para deteção de contacto ou força relativa.
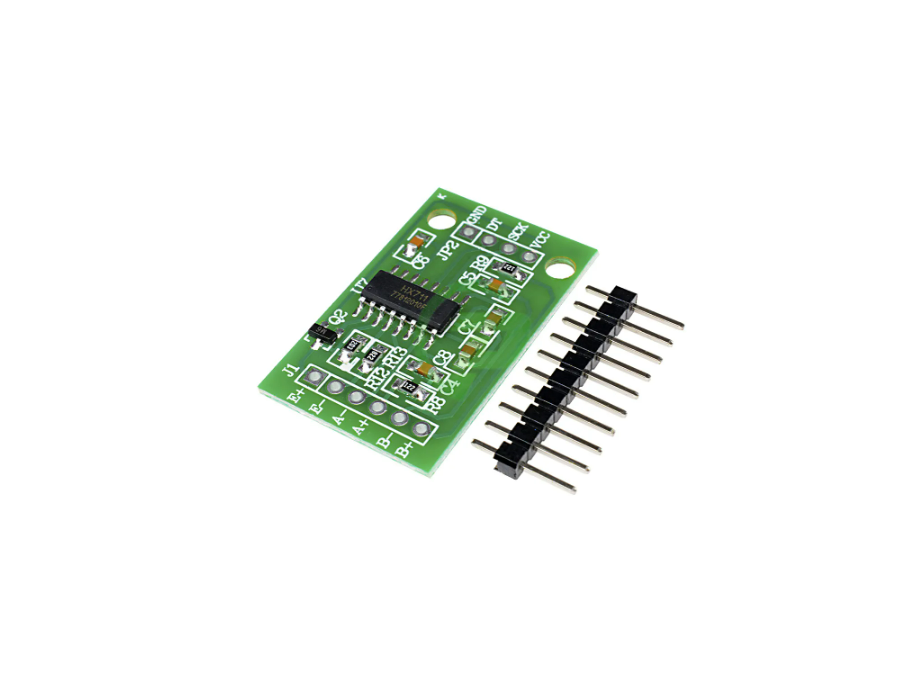
Células de Carga (Load Cells):Como Funcionam: Transdutores que convertem força (tensão ou compressão) numa saída elétrica mensurável, geralmente através de strain gauges (extensómetros) numa ponte de Wheatstone. Precisam de um amplificador (como o HX711).
Aplicações: Medição precisa de peso (balanças), medição de força em atuadores ou juntas de robôs industriais.
Considerações: Requerem amplificação e calibração. Existem em várias capacidades de carga.
Sensores Táteis (Bumpers/Whiskers):Como Funcionam: Interruptores mecânicos simples (microswitches) que são acionados quando o robô colide fisicamente com algo. "Whiskers" (bigodes) são alavancas longas que acionam um switch ao tocar num obstáculo.
Aplicações: Deteção de colisão básica e barata em robôs móveis simples.
Considerações: Fornecem apenas informação binária (colidiu/não colidiu), sem informação de distância ou força.
8. Sensores de Som (Microfones)
Permitem ao robô detetar sons no ambiente.
Como Funcionam: Convertem ondas sonoras em sinais elétricos. Podem ser simples módulos que detetam a presença de som acima de um limiar ou microfones que capturam o áudio para processamento.
Aplicações: Robôs ativados por voz ou comandos sonoros (ex: bater palmas), monitorização de ruído ambiente, localização de fontes sonoras (com múltiplos microfones).
Considerações: Processar áudio (reconhecimento de voz, análise de som) requer um poder de processamento considerável, muitas vezes além das capacidades de microcontroladores simples como o Arduino Uno. Módulos com pré-amplificação e ajuste de limiar são mais fáceis de usar para deteção simples.
Exemplo Popular: Módulos com microfone electret e comparador LM393 (para deteção de som), microfones MEMS I2S (para captura de áudio de maior qualidade com microcontroladores mais potentes como ESP32 ou Raspberry Pi).
9. GPS (Global Positioning System)
Essencial para robôs que operam ao ar livre e precisam de saber a sua localização global.
Como Funcionam: Módulos recetores GPS recebem sinais de múltiplos satélites em órbita para calcular as coordenadas geográficas (latitude, longitude, altitude).
Aplicações: Navegação autónoma de robôs e drones em exteriores, geolocalização de dados recolhidos pelo robô.
Considerações: Requerem linha de visão para o céu (não funcionam bem em interiores ou "canyons urbanos"). A precisão típica é de alguns metros, podendo ser melhorada com técnicas como DGPS ou RTK (mais complexas e caras). Comunicam geralmente via série (UART) usando o protocolo NMEA.
Exemplo Popular: U-blox NEO-6M, NEO-7M, NEO-M8N (módulos GPS comuns e fiáveis).
10. Câmaras (Visão Computacional)
Embora a visão computacional seja um campo vasto por si só, as câmaras são sensores cruciais para muitas aplicações robóticas avançadas.
Como Funcionam: Capturam imagens ou vídeo do ambiente.
Aplicações: Reconhecimento de objetos, deteção de faces, leitura de códigos (QR, barras), navegação visual (VSLAM), seguimento de objetos coloridos, inspeção de qualidade.
Considerações: Processar imagens e vídeo exige um poder computacional significativo. Microcontroladores como o Arduino têm dificuldades, sendo mais adequados para plataformas como Raspberry Pi, Jetson Nano ou microcontroladores mais potentes (ESP32-CAM). Existem câmaras simples (PixyCam) que fazem algum processamento a bordo para tarefas específicas (ex: seguir objetos coloridos).
Módulos Essenciais para Robótica
Para além dos sensores, existem outros módulos eletrónicos que são componentes chave na construção de robôs. Estes módulos agregam funcionalidade e simplificam o design.
1. Microcontroladores e Placas de Desenvolvimento
São o "cérebro" do robô, responsáveis por ler os dados dos sensores, tomar decisões e controlar os atuadores (motores, servos, etc.).
Arduino (Uno, Nano, Mega, etc.):Função: Plataforma de prototipagem eletrónica de código aberto baseada em hardware e software fáceis de usar. Ideal para iniciantes e projetos de complexidade baixa a média.
Vantagens: Comunidade enorme, muitas bibliotecas e exemplos disponíveis, baixo custo, fácil de programar (linguagem baseada em C++ simplificada). Muito popular em Portugal em contextos educativos e de hobby.
Limitações: Poder de processamento e memória limitados (especialmente Uno/Nano), poucas portas de I/O (Uno/Nano), sem conectividade nativa (WiFi/Bluetooth, exceto em modelos específicos).
ESP32 / ESP8266:Função: Microcontroladores de baixo custo com WiFi e Bluetooth integrados.
Vantagens: Conectividade sem fios nativa (ideal para IoT e robôs controlados remotamente), mais poder de processamento e memória que Arduinos básicos, podem ser programados com o Arduino IDE.
Limitações: Menos portas de I/O que o Arduino Mega, gestão de energia pode ser mais complexa.
Raspberry Pi (Pi 4, Pi Zero, Pico):Função: Computadores de placa única (SBC - Single Board Computer) que correm um sistema operativo (Linux). O Raspberry Pi Pico é um microcontrolador, mais comparável ao ESP32/Arduino.
Vantagens (SBCs como Pi 4): Elevado poder de processamento (permite visão computacional, IA, servidores web), conectividade completa (WiFi, Bluetooth, Ethernet, USB, HDMI), sistema operativo completo (multitarefa, fácil instalação de software).
Vantagens (Pico): Microcontrolador potente e de baixo custo da fundação Raspberry Pi, com periféricos interessantes (PIO - Programmable I/O).
Limitações (SBCs): Consumo de energia mais elevado, controlo de hardware em tempo real pode ser menos preciso que microcontroladores dedicados (sem um SO), mais complexo de configurar para iniciantes em eletrónica.
Limitações (Pico): Menos bibliotecas "prontas a usar" que Arduino, sem conectividade sem fios nativa (exceto Pico W).
A escolha da plataforma depende da complexidade do projeto, necessidade de processamento, conectividade e familiaridade do utilizador. Muitas vezes, usa-se uma combinação (ex: Raspberry Pi para tarefas de alto nível e um Arduino/ESP32 para controlo de baixo nível).
2. Drivers de Motores
Microcontroladores geralmente não conseguem fornecer corrente suficiente para alimentar motores diretamente, nem lidar com as tensões necessárias ou a inversão de direção. Os drivers de motores fazem essa ponte.
H-Bridge (Ponte H):Função: Circuito que permite controlar a direção e velocidade (usando PWM - Pulse Width Modulation) de motores DC escovados.
Exemplo Popular: L298N (módulo H-bridge duplo, muito comum mas ineficiente), TB6612FNG (mais eficiente e compacto), DRV8833.
Drivers para Motores de Passo (Stepper Motors):Função: Controlam motores de passo, que rodam em ângulos discretos ("passos"). Permitem posicionamento preciso sem feedback (encoder), mas requerem sequências de sinais específicas.
Exemplo Popular: A4988, DRV8825 (drivers comuns para impressoras 3D e CNC, fáceis de usar com microcontroladores).
Controladores de Servomotores:Função: Servomotores (servos) têm eletrónica de controlo integrada e são controlados por um sinal PWM específico (posição definida pela largura do pulso). No entanto, para controlar muitos servos, um controlador dedicado (ligado via I2C) alivia o microcontrolador principal.
Exemplo Popular: PCA9685 (controlador I2C de 16 canais PWM, ideal para robôs com muitos servos como hexápodes ou braços robóticos).
3. Módulos de Comunicação
Permitem ao robô comunicar com outros dispositivos ou redes.
WiFi / Bluetooth: Integrados em placas como ESP32 ou adicionados via módulos (ex: ESP-01 para Arduino) ou dongles USB (para Raspberry Pi). Essenciais para controlo remoto via smartphone, ligação à internet (IoT), comunicação entre robôs.
Módulos de Rádio Frequência (RF): Para comunicação sem fios ponto-a-ponto ou em rede a distâncias variáveis (curtas a longas), sem depender de infraestrutura WiFi/Bluetooth.Exemplo Popular: NRF24L01 (2.4GHz, curto/médio alcance, baixo custo), LoRa (Long Range, baixa taxa de dados, ideal para aplicações IoT de longo alcance e baixo consumo).
Módulos Ethernet: Para ligação de rede cablada (mais fiável que WiFi). Comuns em Raspberry Pi ou adicionados via "shields" a Arduinos.
4. Módulos de Gestão de Energia
Cruciais para robôs alimentados por bateria.
Reguladores de Tensão: Convertem a tensão da bateria (que varia) para tensões estáveis necessárias pelos componentes (ex: 5V para microcontroladores, 3.3V para sensores). Podem ser lineares (simples, mas ineficientes) ou switching (step-up/boost, step-down/buck - mais eficientes).
Módulos Carregadores de Bateria: Gerem o processo de carga de baterias recarregáveis (Li-ion, LiPo, NiMH), garantindo segurança e longevidade.Exemplo Popular: TP4056 (módulo carregador para baterias Li-ion individuais).
Módulos de Proteção de Bateria (BMS - Battery Management System): Protegem baterias de lítio contra sobrecarga, descarga excessiva, curto-circuito e, por vezes, balanceiam as células em packs.

5. Módulos de Display/Interface
Fornecem feedback visual ao utilizador ou permitem interação.
Ecrãs LCD (Liquid Crystal Display): Comuns em versões de caracteres (ex: 16x2, 20x4) ou gráficos. Relativamente baratos e fáceis de usar (interfaces paralelas ou I2C).
Ecrãs OLED (Organic Light Emitting Diode): Mais brilhantes, maior contraste (pretos verdadeiros), menor consumo (pixels pretos estão desligados). Geralmente mais pequenos e com interface I2C/SPI.
Ecrãs TFT (Thin Film Transistor): Ecrãs a cores, muitas vezes com capacidade tátil (touchscreen). Requerem mais poder de processamento e pinos do microcontrolador. Mais comuns com Raspberry Pi ou microcontroladores potentes.
Integração: Juntando as Peças
A magia da robótica acontece quando estes sensores e módulos são integrados num sistema coeso. Isto envolve:
Conexões Físicas: Ligar os componentes corretamente, respeitando os níveis de tensão (5V, 3.3V) e os protocolos de comunicação (GPIO digital, entrada analógica ADC, UART, I2C, SPI).
Programação: Escrever o código (firmware) para o microcontrolador que:Lê os dados dos sensores (usando bibliotecas específicas).
Processa esses dados (filtragem, fusão, tomada de decisão).
Controla os atuadores (motores, servos) através dos drivers/módulos apropriados.
Gere a comunicação (se aplicável).
Alimentação: Fornecer energia estável e suficiente a todos os componentes.
Interfaces de Comunicação Comuns:
GPIO (General Purpose Input/Output): Pinos digitais que podem ser configurados como entrada (ler estado de um botão, sinal de um sensor PIR) ou saída (ligar um LED, enviar sinal para um driver).
ADC (Analog-to-Digital Converter): Converte uma tensão analógica (ex: de um LDR, FSR, sensor IR de distância analógico) num valor digital que o microcontrolador pode ler.
I2C (Inter-Integrated Circuit): Protocolo de comunicação série síncrono que permite ligar múltiplos dispositivos (sensores, ecrãs, controladores) a apenas dois pinos do microcontrolador (SDA - dados, SCL - clock). Cada dispositivo tem um endereço único.
SPI (Serial Peripheral Interface): Outro protocolo série síncrono, geralmente mais rápido que I2C, mas requer mais pinos (MOSI, MISO, SCLK, CS). Usado para ecrãs, cartões SD, alguns sensores de alta velocidade.
UART (Universal Asynchronous Receiver/Transmitter): Comunicação série assíncrona simples (pinos TX - transmissão, RX - receção). Usada para comunicação com módulos GPS, módulos Bluetooth/WiFi, comunicação entre microcontroladores ou com um PC.
Como Escolher os Sensores e Módulos Certos para o seu Projeto Com tantas opções disoníveis, como escolher?
Considere os seguintes fatores:
Objetivo do Robô: O que precisa que o robô faça? Navegar numa sala? Seguir uma linha? Agarrar objetos? Medir temperatura? As funções determinam os sensores necessários.
Ambiente de Operação: O robô vai operar em interiores ou exteriores? Em ambientes com muita ou pouca luz? Com muitos obstáculos? Isto influencia a escolha de sensores (ex: GPS para exterior, IR pode falhar com luz solar direta).
Precisão e Alcance: Quão precisa precisa ser a medição? Qual o alcance necessário para os sensores de distância? Sensores mais precisos ou de maior alcance são geralmente mais caros.
Orçamento: Defina um orçamento. Felizmente, muitos sensores e módulos populares (HC-SR04, DHT11, MPU-6050, Arduino, ESP32) são bastante acessíveis em lojas de eletrónica em Portugal ou online.
Complexidade e Conhecimento: Comece com projetos mais simples se for iniciante. Sensores digitais (I2C, UART) podem ser mais fáceis de integrar do que analógicos que requerem calibração. Plataformas como Arduino têm uma curva de aprendizagem mais suave.
Plataforma de Controlo: Certifique-se de que os sensores/módulos escolhidos são compatíveis com o seu microcontrolador/SBC (níveis de tensão, interfaces de comunicação, bibliotecas de software disponíveis).
Consumo de Energia: Especialmente importante para robôs alimentados por bateria. Escolha componentes de baixo consumo ou implemente estratégias de gestão de energia (ex: colocar sensores em modo de espera).
Processo de Decisão Sugerido:
Defina claramente os requisitos do seu robô.
Liste os tipos de informação que o robô precisa (distância, orientação, luz, etc.).
Pesquise sensores e módulos que forneçam essa informação. Compare especificações (alcance, precisão, interface, consumo, preço). Leia reviews e tutoriais.
Verifique a compatibilidade com a sua plataforma de controlo (Arduino, ESP32, Raspberry Pi).
Considere a facilidade de integração e a disponibilidade de bibliotecas.
Faça a sua escolha, começando talvez com os componentes mais críticos.
O Futuro dos Sensores e Módulos Robóticos
A área de sensores e módulos para robótica está em constante evolução. Algumas tendências a observar:
Fusão de Sensores e IA: Algoritmos mais sofisticados (muitas vezes baseados em IA) para combinar dados de múltiplos sensores (sensor fusion) e obter uma compreensão mais robusta e precisa do ambiente. Processamento de IA na "edge" (no próprio robô).
Miniaturização e Integração: Sensores e módulos cada vez menores, mais leves e integrando mais funcionalidades num único chip (System-on-Chip - SoC).
Baixo Consumo: Otimização do consumo energético para aumentar a autonomia de robôs móveis e dispositivos IoT.
Sensores Biomiméticos: Inspirados na biologia (ex: câmaras evento-based inspiradas no olho humano, sensores táteis semelhantes à pele).
Soft Robotics Sensors: Sensores flexíveis e extensíveis para integração em robôs "moles" (soft robots).
Comunicação Melhorada: Tecnologias como 5G permitirão comunicação de baixa latência e alta largura de banda para robôs conectados.
Conclusão: Construindo o Futuro da Robótica em Portugal
Os sensores e módulos são os blocos de construção fundamentais que permitem aos robôs perceber, pensar e agir. Desde o simples seguidor de linha construído com sensores IR e um Arduino, até aos complexos robôs autónomos equipados com LiDAR, IMUs e câmaras processadas por potentes SBCs, a escolha e integração correta destes componentes é a chave para o sucesso.
O ecossistema de robótica em Portugal está a crescer, com cada vez mais entusiastas, estudantes e empresas a explorarem as vastas possibilidades desta tecnologia. Compreender os princípios de funcionamento e as aplicações dos diversos sensores para robótica e módulos essenciais é o primeiro passo para quem deseja participar nesta revolução tecnológica.
Esperamos que este guia detalhado sirva como um recurso valioso para os seus projetos. O mundo da robótica é vasto e desafiante, mas também incrivelmente recompensador. Comece pequeno, experimente, aprenda com os erros e, acima de tudo, divirta-se a dar "sentidos" às suas criações robóticas! A próxima grande inovação em automação e robótica em Portugal pode começar na sua bancada.